Pegasus Simulator
Overview
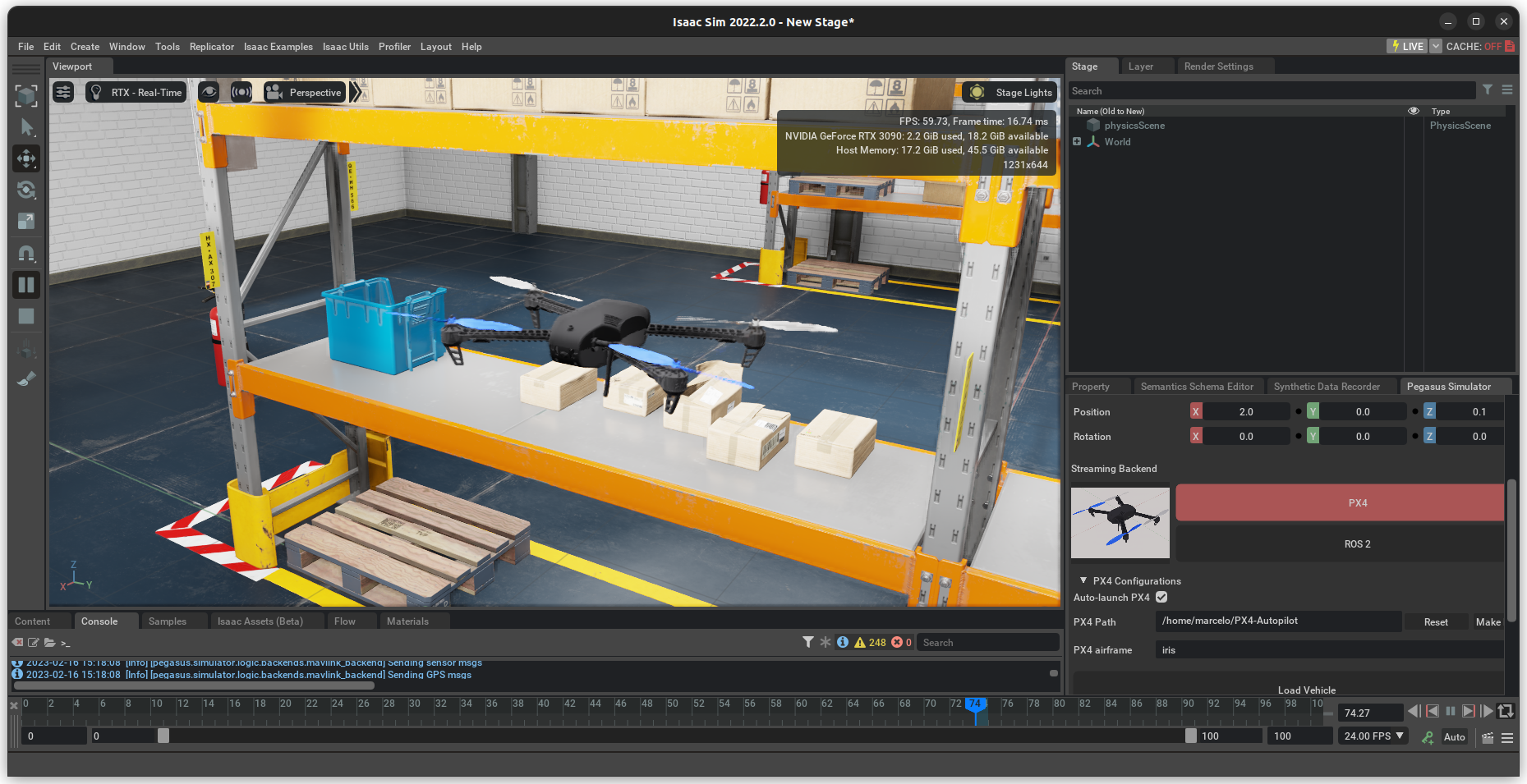
Pegasus Simulator is a framework built on top of NVIDIA Omniverse and Isaac Sim. It is designed to provide an easy yet powerful way of simulating the dynamics of multirotors vehicles. It provides a simulation interface for PX4 integration as well as custom python control interface. At the moment, only multirotor vehicles are supported, with support for other vehicle topologies planned for future versions.
If you find Pegasus Simulator useful in your academic work, please cite the paper below. It is also available here.
@INPROCEEDINGS{10556959,
author={Jacinto, Marcelo and Pinto, João and Patrikar, Jay and Keller, John and Cunha, Rita and Scherer, Sebastian and Pascoal, António},
booktitle={2024 International Conference on Unmanned Aircraft Systems (ICUAS)},
title={Pegasus Simulator: An Isaac Sim Framework for Multiple Aerial Vehicles Simulation},
year={2024},
volume={},
number={},
pages={917-922},
keywords={Simulation;Robot sensing systems;Real-time systems;Sensor systems;Sensors;Task analysis},
doi={10.1109/ICUAS60882.2024.10556959}}
Latest Updates
⚠️ For users of versions prior to v5.1.0:
A new command line tool named isaac_run is now used to launch Isaac Sim. This is a function that should be added to your .bashrc or .zshrc file during the installation of Isaac Sim. See Installation Instructions for more details.
This was done to simplify the launching of Isaac Sim from the terminal with ROS2 support. All previous instructions that mentioned launching Isaac Sim examples from the examples folder using the ISAACSIM_PYTHON command should now use isaac_run instead.
Please refer to the updated documentation for more details.
2025-10-26: Pegasus Simulator v5.1.0 is released for Isaac 5.1.0. This version is NOT compatible with older versions of Isaac Sim. The Ardupilot experimental interface was not tested in this version. This update had an initial open-source contribution from Victor Kallenbach.
2025-10-25: Pegasus Simulator v4.5.1 is released for Isaac 4.5.0. This version is NOT compatible with older versions of Isaac Sim. The Ardupilot experimental interface was fixed and improved by Seunghwan Jo and Tomer Tiplitsky.
2025-07-20: Pegasus Simulator v4.5.0 is released for Isaac 4.5.0. This version is NOT compatible with older versions of Isaac Sim. The Ardupilot experimental interface was not tested in this version.
2024-11-01: Pegasus Simulator v4.2.0 is released for Isaac 4.2.0. This version is NOT compatible with older versions of Isaac Sim. This version includes a new experimental interface for Ardupilot integration, provided by open-source contributor Tomer Tiplitsky.
2024-08-02: Pegasus Simulator v4.1.0 is released for Isaac 4.1.0. This version is NOT compatible with older versions of Isaac Sim.
Other Simulation Frameworks
In this section, we acknowledge the nobel work of those who came before us and inspired this work:
[KH04] Gazebo simulator
[FBAS16] RotorS simulation plugin for gazebo
[MHP15] PX4-SITL simulation plugin for gazebo
[SDLK18] Microsoft Airsim project for Unreal Engine
[SNK+21] Flightmare simulator for Unity
[Bab13] jMAVSim java simulator
“If I have seen further than others, it is by standing upon the shoulders of giants.”, Sir Isaac Newton
Project Sponsors
Dynamics Systems and Ocean Robotics (DSOR) group of the Institute for Systems and Robotics (ISR), a research unit of the Laboratory of Robotics and Engineering Systems (LARSyS).
Instituto Superior Técnico, Universidade de Lisboa
The work developed by Marcelo Jacinto and João Pinto was supported by Ph.D. grants funded by Fundação para as Ciências e Tecnologias (FCT).
![]()
![]()
![]()
![]()
![]()