Simulation with Moving People
In this tutorial, you will learn how to add moving people to your standalone simulations. This is useful for dynamic applications such as target tracking, surveillance, and search and rescue missions.
Note
Here we follow a different approach to simulate moving people than what is provided in the official NVIDIA Isaac Sim documentation. We believe that our API is simpler and more intuitive to use in most user cases. I also needed this for my own Ph.D. research :)
0. Preparation
This tutorial assumes that you have followed the Your First Simulation section first.
1. Code
The tutorial corresponds to the 9_people.py example in the examples directory.
1#!/usr/bin/env python
2"""
3| File: 9_people.py
4| License: BSD-3-Clause. Copyright (c) 2024, Marcelo Jacinto. All rights reserved.
5| Description: This files serves as an example on how to build an app that makes use of the Pegasus API to run a simulation
6| where people move around in the world.
7"""
8
9# Imports to start Isaac Sim from this script
10import carb
11
12from isaacsim import SimulationApp
13
14# Start Isaac Sim's simulation environment
15# Note: this simulation app must be instantiated right after the SimulationApp import, otherwise the simulator will crash
16# as this is the object that will load all the extensions and load the actual simulator.
17simulation_app = SimulationApp({"headless": False})
18
19# -----------------------------------
20# The actual script should start here
21# -----------------------------------
22import omni.timeline
23from omni.isaac.core.world import World
24from isaacsim.core.utils.extensions import enable_extension
25
26# Enable/disable ROS bridge extensions to keep only ROS2 Bridge
27enable_extension("isaacsim.ros2.bridge")
28
29# Update the simulation app with the new extensions
30simulation_app.update()
31
32# -------------------------------------------------------------------------------------------------
33# These lines are needed to restart the USD stage and make sure that the people extension is loaded
34# -------------------------------------------------------------------------------------------------
35import omni.usd
36omni.usd.get_context().new_stage()
37
38import numpy as np
39
40# Import the Pegasus API for simulating drones
41from pegasus.simulator.params import ROBOTS, SIMULATION_ENVIRONMENTS
42from pegasus.simulator.logic.interface.pegasus_interface import PegasusInterface
43from pegasus.simulator.logic.people.person import Person
44from pegasus.simulator.logic.people.person_controller import PersonController
45from pegasus.simulator.logic.graphical_sensors.monocular_camera import MonocularCamera
46from pegasus.simulator.logic.backends.px4_mavlink_backend import PX4MavlinkBackend, PX4MavlinkBackendConfig
47from pegasus.simulator.logic.backends.ros2_backend import ROS2Backend
48from pegasus.simulator.logic.vehicles.multirotor import Multirotor, MultirotorConfig
49from pegasus.simulator.logic.interface.pegasus_interface import PegasusInterface
50
51# Example controller class that make a person move in a circle around the origin of the world
52# Note: You could create a different controller with a different behaviour. For instance, you could:
53# 1. read the keyboard input to move the person around the world.
54# 2. read the target position from a ros topic,
55# 3. read the target position from a file,
56# 4. etc.
57class CirclePersonController(PersonController):
58
59 def __init__(self):
60 super().__init__()
61
62 self._radius = 5.0
63 self.gamma = 0.0
64 self.gamma_dot = 0.3
65
66 def update(self, dt: float):
67
68 # Update the reference position for the person to track
69 self.gamma += self.gamma_dot * dt
70
71 # Set the target position for the person to track
72 self._person.update_target_position([self._radius * np.cos(self.gamma), self._radius * np.sin(self.gamma), 0.0])
73
74
75# Auxiliary scipy and numpy modules
76from scipy.spatial.transform import Rotation
77
78# -------------------------------------------------------------------------------------------------
79# Define the PegasusApp class where the simulation will be run
80# -------------------------------------------------------------------------------------------------
81class PegasusApp:
82 """
83 A Template class that serves as an example on how to build a simple Isaac Sim standalone App.
84 """
85
86 def __init__(self):
87 """
88 Method that initializes the PegasusApp and is used to setup the simulation environment.
89 """
90
91 # Acquire the timeline that will be used to start/stop the simulation
92 self.timeline = omni.timeline.get_timeline_interface()
93
94 # Start the Pegasus Interface
95 self.pg = PegasusInterface()
96
97 # Acquire the World, .i.e, the singleton that controls that is a one stop shop for setting up physics,
98 # spawning asset primitives, etc.
99 self.pg._world = World(**self.pg._world_settings)
100 self.world = self.pg.world
101
102 # Launch one of the worlds provided by NVIDIA
103 #self.pg.load_environment(SIMULATION_ENVIRONMENTS["Curved Gridroom"])
104 self.pg.load_asset(SIMULATION_ENVIRONMENTS["Box Room"], "/World/layout")
105
106 # Check the available assets for people
107 people_assets_list = Person.get_character_asset_list()
108 for person in people_assets_list:
109 print(person)
110
111 # Create the controller to make on person walk around in circles
112 person_controller = CirclePersonController()
113 p1 = Person("person1", "original_male_adult_construction_05", init_pos=[3.0, 0.0, 0.0], init_yaw=1.0, controller=person_controller)
114
115 # Create a person without setting up a controller, and just setting a manual target position for it to track
116 p2 = Person("person2", "original_female_adult_business_02", init_pos=[2.0, 0.0, 0.0])
117 p2.update_target_position([10.0, 0.0, 0.0], 1.0)
118
119 config_multirotor = MultirotorConfig()
120 # Create the multirotor configuration
121 mavlink_config = PX4MavlinkBackendConfig({
122 "vehicle_id": 0,
123 "px4_autolaunch": True,
124 "px4_dir": "/home/marcelo/PX4-Autopilot" # TODO -> Change this line to the path where you have the PX4-Autopilot code downloaded (this is an example on how you can set your own path for PX4)
125 })
126
127 config_multirotor.backends = [
128 PX4MavlinkBackend(mavlink_config),
129 ROS2Backend(vehicle_id=1,
130 config={
131 "namespace": 'drone',
132 "pub_sensors": False,
133 "pub_graphical_sensors": True,
134 "pub_state": True,
135 "pub_tf": False,
136 "sub_control": False,})]
137
138 config_multirotor.graphical_sensors = [MonocularCamera("camera", config={"update_rate": 60.0})]
139
140 Multirotor(
141 "/World/quadrotor",
142 ROBOTS['Pegasus'],
143 0,
144 [0.0, 0.0, 0.07],
145 Rotation.from_euler("XYZ", [0.0, 0.0, 0.0], degrees=True).as_quat(),
146 config=config_multirotor,
147 )
148
149 # Set the camera of the viewport to a nice position
150 self.pg.set_viewport_camera([5.0, 9.0, 6.5], [0.0, 0.0, 0.0])
151
152 # Reset the simulation environment so that all articulations (aka robots) are initialized
153 self.world.reset()
154
155 # Auxiliar variable for the timeline callback example
156 self.stop_sim = False
157
158 def run(self):
159 """
160 Method that implements the application main loop, where the physics steps are executed.
161 """
162
163 # Start the simulation
164 self.timeline.play()
165
166 # The "infinite" loop
167 while simulation_app.is_running() and not self.stop_sim:
168 # Update the UI of the app and perform the physics step
169 self.world.step(render=True)
170
171 # Cleanup and stop
172 carb.log_warn("PegasusApp Simulation App is closing.")
173 self.timeline.stop()
174 simulation_app.close()
175
176def main():
177
178 # Instantiate the template app
179 pg_app = PegasusApp()
180
181 # Run the application loop
182 pg_app.run()
183
184if __name__ == "__main__":
185 main()
2. Explanation
To start a pre-programmed simulation with moving people, you need to ensure that the People extension provided by NVIDIA is enabled. Note, in Isaac 4.5.0 we also need to create a new stage for the people extension to start properly.
23import omni.timeline
24from omni.isaac.core.world import World
25from isaacsim.core.utils.extensions import enable_extension
26
27# Enable/disable ROS bridge extensions to keep only ROS2 Bridge
28enable_extension("isaacsim.ros2.bridge")
29
30# Update the simulation app with the new extensions
31simulation_app.update()
32import omni.usd
33omni.usd.get_context().new_stage()
We also need to import the Person and the PersonController classes. This follows the same strategy adopted for the vehicles and the control backends.
61from pegasus.simulator.logic.people.person import Person
62from pegasus.simulator.logic.people.person_controller import PersonController
The PersonController is an interface class that a user defined controller must inherit from. This controller is responsible for defining the behavior of the person in the simulation.
In this example, our controller makes a person walk in circles, but you can define any behavior you want. For instance, you could:
read the keyboard input to move the person around the world.
read the target position from a ros topic,
read the target position from a file,
etc…
69# Example controller class that make a person move in a circle around the origin of the world
70# Note: You could create a different controller with a different behaviour. For instance, you could:
71# 1. read the keyboard input to move the person around the world.
72# 2. read the target position from a ros topic,
73# 3. read the target position from a file,
74# 4. etc.
75class CirclePersonController(PersonController):
76
77 def __init__(self):
78 super().__init__()
79
80 self._radius = 5.0
81 self.gamma = 0.0
82 self.gamma_dot = 0.3
83
84 def update(self, dt: float):
85
86 # Update the reference position for the person to track
87 self.gamma += self.gamma_dot * dt
88
89 # Set the target position for the person to track
90 self._person.update_target_position([self._radius * np.cos(self.gamma), self._radius * np.sin(self.gamma), 0.0])
Note
To check all the functions that you can implement in your controller, check the PersonController class in the API reference.
The next step is to create a person in the simulation. But, you let’s imagine you don’t know which 3D models are available. Well, you can call the static method Person.get_character_asset_list() function to list all the available models.
124 # Check the available assets for people
125 people_assets_list = Person.get_character_asset_list()
126 for person in people_assets_list:
127 print(person)
Now that you know which models you can load, you can create a person in the simulation. You can set the initial position, orientation, and the controller that will define the behavior of the person. Note that if you just want to send a person to a given position manually (without using a controller), you can! Just check “Person 2”.
129 # Create the controller to make on person walk around in circles
130 person_controller = CirclePersonController()
131 p1 = Person("person1", "original_male_adult_construction_05", init_pos=[3.0, 0.0, 0.0], init_yaw=1.0, controller=person_controller)
132
133 # Create a person without setting up a controller, and just setting a manual target position for it to track
134 p2 = Person("person2", "original_female_adult_business_02", init_pos=[2.0, 0.0, 0.0])
135 p2.update_target_position([10.0, 0.0, 0.0], 1.0)
3. Execution
Now let’s run the Python script:
isaac_run examples/9_people.py
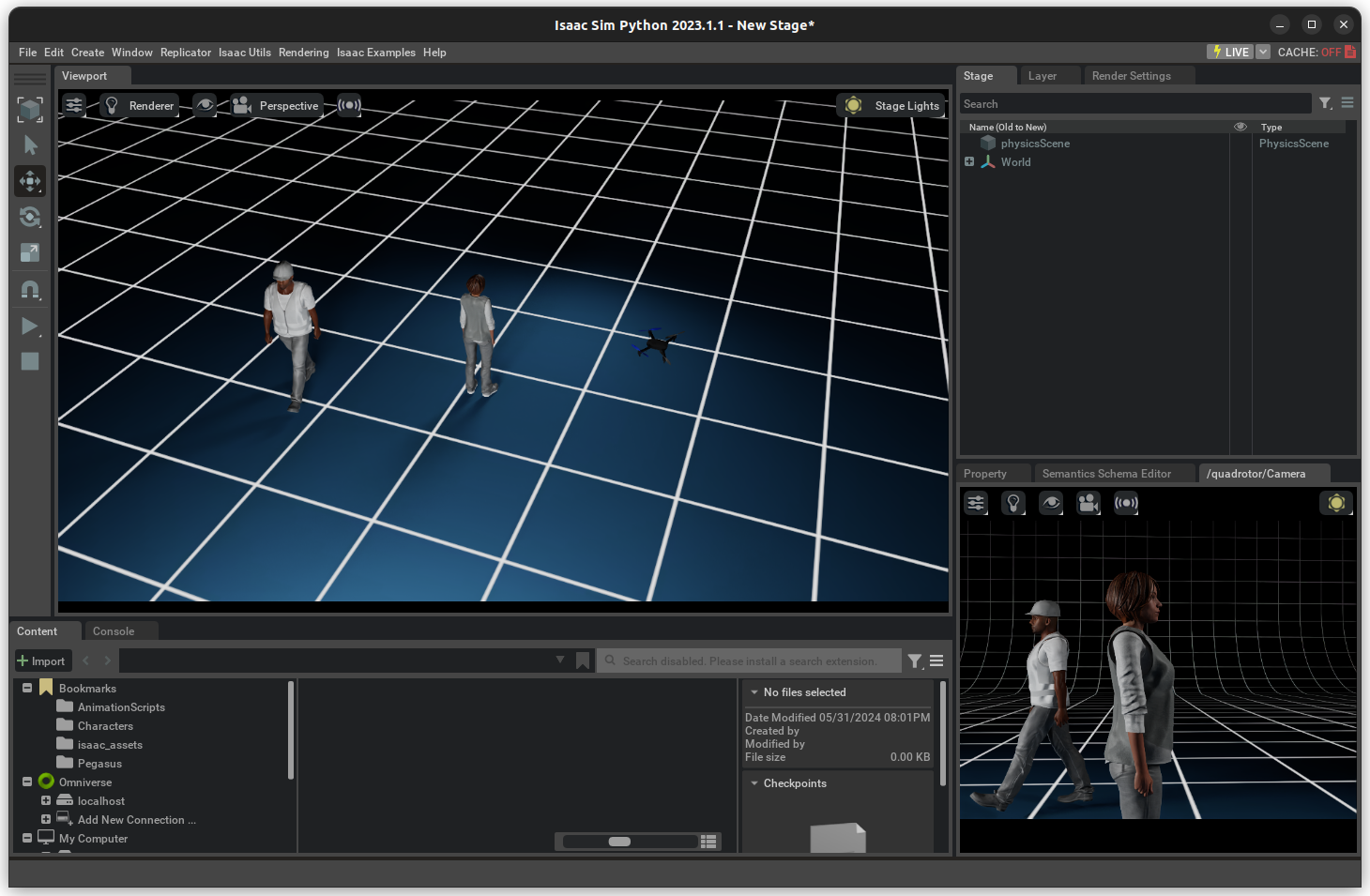
This should open a stage with a blue ground-plane with an 3DR Iris vehicle model in it. The simulation should start playing automatically and the stage being rendered. You will see 2 people being simulated with one of them walking in circles.
If you open QGroundControl you can control the vehicle.