PX4 Integration
The PX4-Autopilot support is provided by making use of the Control Backends API , and implementing a custom
PX4MavlinkBackend which contains a built-in tool to launch and kill PX4 in SITL mode automatically.
To instantiate a PX4MavlinkBackend via Python scripting, consider the following example:
# Import the Mavlink backend module
from pegasus.simulator.logic.backends.px4_mavlink_backend import PX4MavlinkBackend, PX4MavlinkBackendConfig
# Create the multirotor configuration
# In this example we are showing the default parameters that are used if you do not specify them
mavlink_config = PX4MavlinkBackendConfig({"vehicle_id": 0,
"connection_type": "tcpin",
"connection_ip": "localhost",
# The actual port that gets used = "connection_baseport" + "vehicle_id"
"connection_baseport": 4560,
"enable_lockstep": True,
"num_rotors": 4,
"input_offset": [0.0, 0.0, 0.0, 0.0],
"input_scaling": [1000.0, 1000.0, 1000.0, 1000.0],
"zero_position_armed": [100.0, 100.0, 100.0, 100.0],
"update_rate": 250.0,
# Settings for automatically launching PX4
# If px4_autolaunch==False, then "px4_dir" and "px4_vehicle_model" are unused
"px4_autolaunch": True,
"px4_dir": "PegasusInterface().px4_path",
"px4_vehicle_model": "iris",
})
config_multirotor.backends = [PX4MavlinkBackend(mavlink_config)]
Note
In general, the Pegasus Simulator does not need to know where you have PX4 running to simulate the vehicle and send data
through MAVLink . However, if you intend to use the provided PX4 auto-launch feature, you must inform Pegasus Simulator
where you have your local install of PX4.
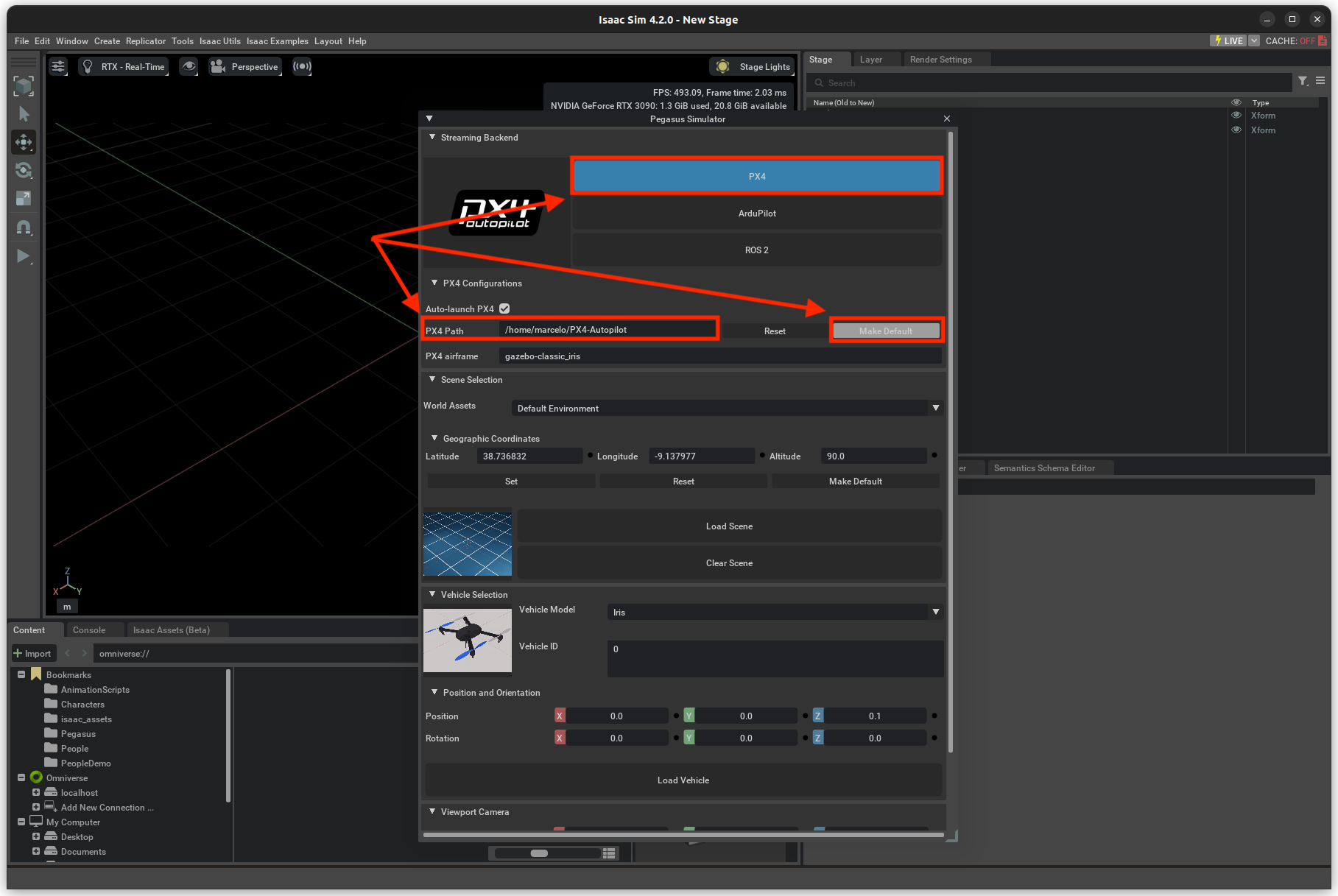
By default, the simulator expects PX4 to be located at ~/PX4-Autopilot directory. You can set the default
path for the PX4-Autopilot by either:
Using the GUI of the Pegasus Simulator when operating in extension mode.
Use the methods provided by
PegasusInterface, i.e:from pegasus.simulator.params import SIMULATION_ENVIRONMENTS from pegasus.simulator.logic.interface.pegasus_interface import PegasusInterface # Start the Pegasus Interface pg = PegasusInterface() # Set the default PX4 installation path used by the simulator # This will be saved for future runs pg.set_px4_path("path_to_px4_directory")